Activities
- Date:
- 27 October 2022
- Venue:
- S2S conference room, National University of Singapore
- Abstract:
- In reinforcement learning, an agent interacts with the environment, learns from feedback about the quality of its actions, and improves its behaviour or policy in order to maximise its expected utility. Learning efficiently in large scale problems is a major challenge. State aggregation is possible in problems with a first-order structure, allowing the agent to learn in an abstraction of the original problem which is of considerably smaller scale. One approach is to learn the Q-values of actions which are approximated by a relational function approximator. This is the basis for relational reinforcement learning (RRL). We abstract the state with first-order features which consist of only variables, thereby aggregating similar states from all problems of the same domain to abstract states. We study the limitations of RRL due to this abstraction and propose three methods to overcome the limitations, extending the types of problems our RRL method can solve. Next, to further improve the learning efficiency, we propose to learn different types of generalised knowledge. Transfer learning is possible by directly leveraging the generalised knowledge to accelerate learning in a new problem. Lastly, we introduce a new class of problems which considers dynamic objects and time-bounded goals. This allows us to model more realistic problems such as robotic applications. We demonstrate zero-shot transfer by training a robot in a simplistic simulator and evaluating its performance in Gazebo.
- Biography:
- Alvin is currently a Senior Member of Technical Staff with the Marine Systems Programme in DSO National Laboratories. He graduated from NTU with a Bachelor's degree in Mechanical Engineering in 2012 and joined DSO National Laboratories upon his graduation as a research engineer. His work in DSO includes mechanical design, control system, and obstacle avoidance for underwater robots. In 2017, Alvin was awarded a postgraduate scholarship by DSO. He was a PhD student with the Edinburgh Centre for Robotics, a joint research centre between Heriot-Watt University and University of Edinburgh. He attained his PhD in Robotics and Autonomous Systems in 2022. Alvin's research interests include automated planning, reinforcement learning, and autonomy for robotics.
- Date:
- 26 September 2022
- Venue:
- The Auditorium, Singapore Polytechnic
- Abstract:
- Until the 20th century, the only way to put to sea for remote places was by sail. Then for 100 years, we used motor-driven research ships. These were (and still are) large, expensive and few in number. As a result, the oceans were under sampled in space and time and oceanographers misled themselves into believing that large-scale phenomena (like basin-scale currents and wind systems) dominated physical oceanography (90%), with more variable and smaller scales (eddies, etc.,) accounting for 10%. The 21st century brought a revelation, with satellites and then small, relatively inexpensive, autonomous platforms demonstrating that the ratio was the other way around, and that if we wanted to understand the oceans, we needed many more platforms. So now we have the traditional research ship (costing O(10^4) Euro/Day) which can carry heavy equipment and a large team, and autonomous platforms (costing O(10^2) Euro/Day) which can go anywhere (eventually) but cannot take people. This two-decadal spread is a huge capability gap. What if you want to take a small research team to a remote island to do research? There is no way to do it for reasonable money. A small motor vessel is simply too small to carry enough fuel for itself, and is not seaworthy for open ocean passages. Re-enter the sailing vessel, but smaller than before. Being powered by wind, its range is essentially unlimited. With a ballasted keel, it can deal with the toughest ocean conditions. I will give examples of expeditions to remote ocean research locations which have yielded spectacular results for O(10^3) Euro/Day, achieving projects for Eur50k instead of a previously impossible Eur500k. As marine technology gets smaller, cheaper, lighter and low power (thanks to the autonomous platforms that are driving these innovations) we can now leverage these developments to fill the gap between research vessels and autonomous platforms at a fraction of the cost of the former, with much greater capability than the latter.
- Biography:
- Starting out with a maths and physics degree, Prof. Potter has been working on oceanography, glaciology and underwater acoustics for 40 years, in the UK, Italy, USA and Singapore, where he founded the ARL in NUS. Prof. Potter has the unusual habit of commuting from one job to the next by sailboat, which sometimes takes several months as he swaps countries. He has sailed over 50,000 n.m. in the open ocean, crossing the Atlantic, Pacific and Indian Oceans. He currently works in Trondheim, Norway and his boat is in the Maldives, from where he supports remote ocean expeditions in his spare time. Prof. Potter is a Fellow of the IEEE and MTS and an international Fellow of the Explorers’ Club. It is no longer true that he neither owns nor operates a television.
-
- Date:
- 23-26 September 2022
- Venue:
- Singapore Polytechnic
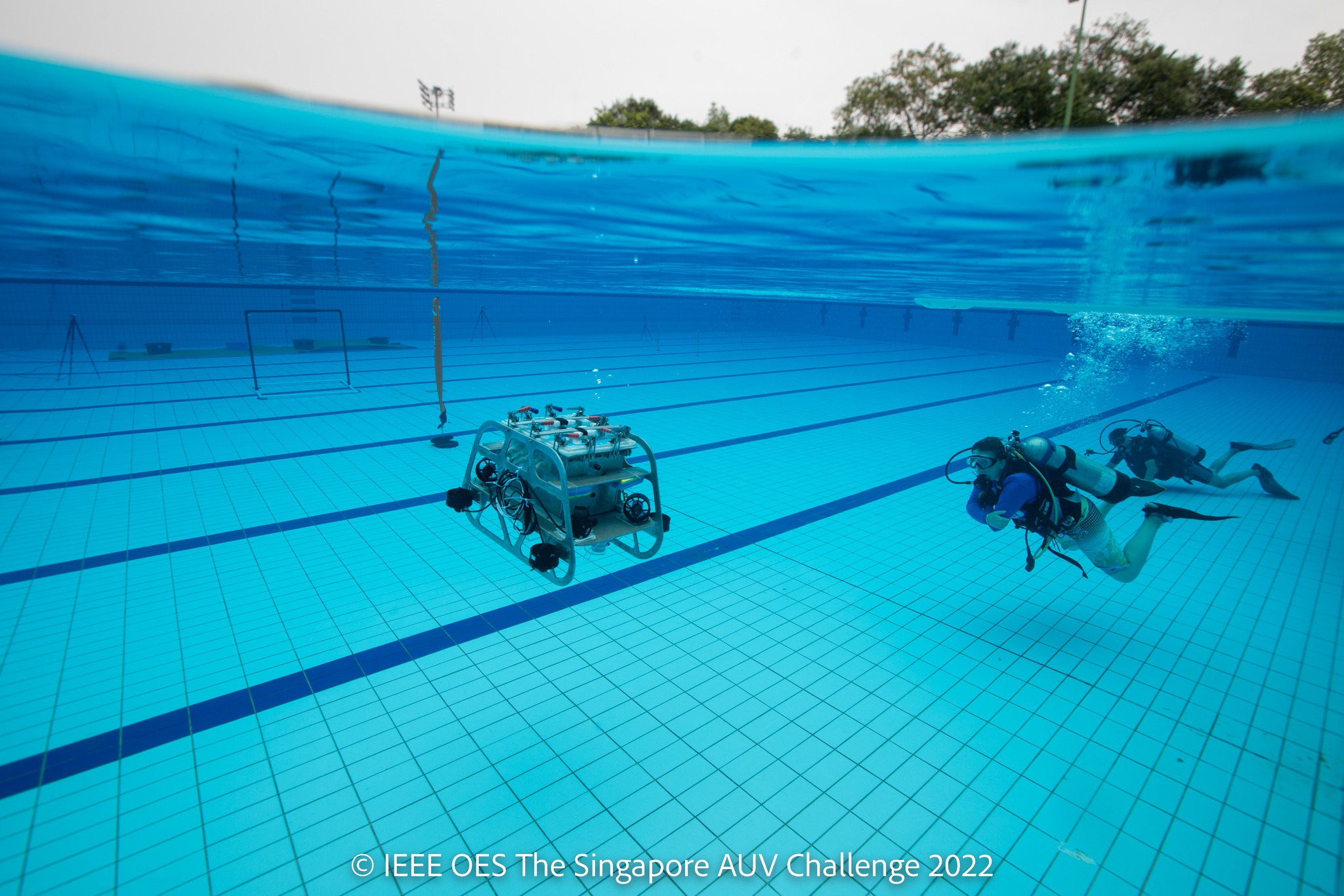
- About:
- Autonomous underwater robotics is an exciting challenge in engineering, which participants get to experience at SAUVC. The competition is great learning ground for participants to experience the challenges of AUV system engineering and develop skills in the related fields of mechanical, electrical and software engineering. This year, a total of 25 teams from all over the world have been shortlisted to participate in SAUVC 2022. For more details, please refer to the SAUVC website..
-





- Date:
- 19-21 September 2022
- Venue:
- Shaw Alumni House, National University of Singapore
- About:
- The IEEE OES AUV Symposium is a collaborative symposium sponsored by IEEE OES and organized once in every two years. It aims to bring together those working in the field of marine robotics, including but not limited to autonomous underwater vehicles (AUV), to exchange new knowledge and explore future directions. For more information, please refer to the AUV Symposium website.
- Date:
- 27 May 2022 (Thursday)
- Time:
- 4:00PM SGT
- Venue:
- S2S Conference Room
- Abstract:
- The talk focoses on discussing the ocean observation technologies in JASCO for marine traffic and marine life monitoring.
- Biography:
- Christopher worked at JASCO Applied Sciences for around 15 years, and is now transitioning into his new role at Irving Ship building. He is also the President of the OES and member of IEEE Joint-OU ad hoc Sustainability Committee.
- Date:
- 22 July 2021 (Thursday)
- Time:
- 8:30AM SGT
- Venue:
- Virtual talk through Zoom
- Abstract:
- Passive acoustic monitoring (PAM) methods are used for monitoring and studying a wide variety of soniferous marine fauna. The use of automatic recognition techniques has largely underpinned the successes of PAM undertakings by improving the ease and repeatability of analyses. Over the past decade, the adoption of machine learning (ML) based recognition techniques has brought about improved accuracy and reliability in mining large acoustic datasets, facilitating a suite of ecological studies, such as call-or cue-based density estimation, stock identification, or cultural transmissions. This talk will provide an overview of PAM undertakings, present a brief overview of the various automation techniques used and contrast them with modern ML-based techniques. We will present a gentle introduction to ML concepts as they apply to acoustic event recognition, and provide a hands-on demonstration of developing a ML model using real underwater acoustic recordings.
- Biography:
- Shyam Madhusudhana is a postdoctoral researcher at the K. Lisa Yang Center for Conservation Bioacoustics (CCB) within the Cornell Lab of Ornithology. His research interests arelargely multidisciplinary as is his academic background–Bachelors in Engineering, Masters in Computer Science, and PhD in Applied Physics. He has also worked as a speech scientist for a leading Automatic Speech Recognition solutions provider. Prior to joining CCB, he has beena research associate atthe Centre for Marine Science and Technology in Australia, a research associate at the National Institute of Oceanography, Goa, India and a postdoctoral research fellow at the Indian Institute of Science Education and Research in Tirupati, India. His current research involves developing deep-learning techniques for realizing effective and efficient machine-listening in the big-data realm, with applications in themonitoring of both marine and terrestrial fauna.
- Date:
- 25 May 2021 (Tuesday)
- Time:
- 8:00AM EST
- Venue:
- Virtual talk through Zoom
- Abstract:
- Acoustic communication systems are prone to extreme Doppler distortions, which are evident as motion-induced center frequency shifting as well as bandwidth spreading caused by random fluctuations in the propagation medium. In multi-carrier acoustic systems operating in conditions of high mobility, Doppler shifts can easily exceed carrier separation, while residual time-variation may cause inter-carrier interference. In this lecture, we overview the basic properties of acoustic communication channels and discuss custom-made Doppler compensation methods for multi-carrier systems. We demonstrate excellent performance of these methods using real data recorded on a mobile underwater acoustic channel.
- Biography:
- Milica Stojanovic graduated from the University of Belgrade, Serbia, in 1988, and received the M.S. and Ph.D. degrees in electrical engineering from Northeastern University in Boston, in 1991 and 1993, respectively. She was a Principal Scientist at the Massachusetts Institute of Technology, and in 2008 joined Northeastern University, where she is currently a Professor of Electrical and Computer Engineering. She is also a Guest Investigator at the Woods Hole Oceanographic Institution. Her research interests include digital communications theory, statistical signal processing and wireless networks, and their applications to underwater acoustic systems. Milica is a Fellow of the IEEE, an Associate Editor for the IEEE Journal of Oceanic Engineering, and the Chair of the IEEE Ocean Engineering Society’s Technical Committee for Underwater Communication, Navigation and Positioning. She also serves on the Editorial Board of the IEEE Signal Processing Magazine and has in past served on the Advisory Board of the IEEE Communication Letters, as an Associate Editor for the IEEE Transactions on Signal Processing, and Associate Editor for the IEEE Transactions on Vehicular Technology. Milica is the recipient of the 2015 IEEE/OES Distinguished Technical Achievement Award, and the 2019 IEEE WICE Outstanding Achievement Award.
- Date:
- 18 March 2021 (Thursday)
- Venue:
- Online event: TC webinar series
- Abstract:
- Acoustic data provide scientific and engineering insights in fields ranging from biology and communications to ocean and Earth science. This talk provides a survey of the recent advances and transformative potential of machine learning (ML), including deep learning, in the field of acoustics. We first provide an overview of ML theory, then discuss several applications in acoustics, including source localization and geophysical inverse problems. With large volumes of training data, ML can discover models describing complex acoustic phenomena such as human speech and reverberation. ML in acoustics is rapidly developing with compelling results and significant future promise.
- Biography:
- Michael Bianco is an Assistant Project Scientist with the Marine Physical Laboratory, University of California San Diego (UCSD), La Jolla, CA, USA. Mike received his Ph.D. degree in Applied Ocean Science from UCSD in 2018 with a thesis focus on machine learning in geophysical inverse problems. Prior to his Ph.D., Mike obtained the B.Sc. degree in Aeronautical and Astronautical Engineering from the Purdue University College of Engineering, West Lafayette, IN, USA, in 2007 and the M.Sc. degree in Oceanography from UCSD in 2015. From 2008–2012, he was an Engineer with Rocketdyne in Los Angeles, CA. His research interests include signal processing and machine learning theory in acoustics and geophysical inverse problems. Mike is a member of the IEEE Signal Processing Society.